2023年11月,面对客户高效稳定的定位和建图需求,思岚科技以业界创新的产品形态提供了SLAMKit定位和建图解决方案,以软件授权的方式嵌入运行在机器人的主控器中,并为机器人提供环境建模与自主定位的能力。
SLAMKit 主要由三个部分组成,分别是:思岚激光雷达、授权盒和授权软件程序。致力于为用户提供行业内首个导航系统软件授权化服务,让产品多快好省,让方案多场景契合。

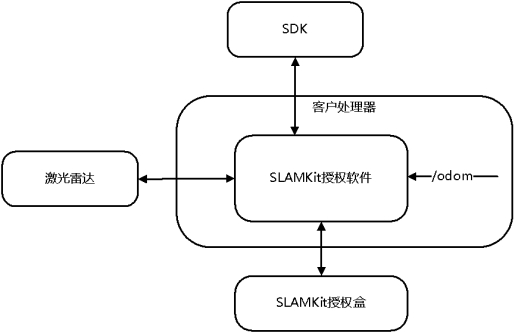
SLAMKit 的核心为授权软件部分,其系统框图如下所示,输入为激光雷达数据、授权盒传感数据、以及里程计数据,其中激光雷达数据和授权盒传感数据为授权软件独立驱动获取,里程计数据来自于客户侧的 ROS 节点。系统的输出可被定义为上层可供二次开发的工具链,包括可视化交互工具 Robostudio、C++ sdk、JAVA sdk、Restful API sdk、ROS sdk 等。
SLAMKit
1. 大场景高分辨率地图构建
2. 思岚自研SharpEdge™ 地图优化技术
3. 高精度实时定位
4. 多变场景鲁棒性定位
5. 可视化工具与SDK完整工具链支撑
6. 产品全生命周期的支持服务
大场景高分辨率地图构建
1.5cm*1.5cm/pixel最高地图分辨率
150m*150m(开发者版);500m*500m(专业版)
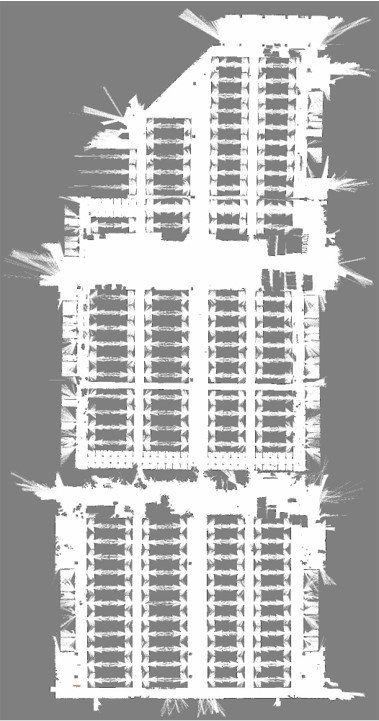
思岚自研
SharpEdge™图优化建图模式,完美勾勒地图细节。细节光滑,无需二次修饰,客户可直接应用。

多变场景鲁棒性定位
动态多变,相速度高及局部特征贫瘠场景下能够实现稳定运行。
可视化工具与
提供C++、Java SDK、ROS、Restful API 等SDK工具包,助力客户快速进行二次开发。提供官网交互软件RoboStudio,提供离线建图、地图编辑、地图拼接等功能。
产品全生命周期的支持服务
可以通过软件授权的方式为客户提供开发、部署和运维服务,完成全生命周期的支持服务。
目前,SLAMKit已在全球渠道上线,可免费获取【开发者版本】试用。值得一提的是,SLAMKit 所提供的授权盒可以作为软件授权方案的授权钥匙,也可以独立作为一个 IMU 模块使用。当授权盒作为独立 IMU 模块使用时,为客户提供持续稳定的九轴传感信号输出,同时体验一把高性能定位建图方案试用。

ROS
ROS兼容双IMU
高精度定位
1. 高精度稳定数据输出
2. 防零飘算法实现稳定yaw角输出
3. 内置双IMU与滤波处理算法
4. 原生USB数据输出接口
ROS
SLAMKit授权盒作为IMU使用时,可读取三轴加速度、三轴陀螺仪、三轴磁力计、三维欧拉角、四元数、去零飘航向角数据,帮助设备获取更稳定、更准确的定位信息。同时200Hz高速多元数据输出。

商用标准的结构与硬件设计
防尘金属外观,商用标准的结构与硬件设计,确保IMU模块高效、稳定地服务于商业应用环境。
原生
内置了高精度的IMU模块,配备原生USB接口,无需外接设备,方便将它与各种计算平台相连,从而实时获取和分析运动数据。
200Hz
支持IMU200Hz高频输出定位和姿态数据,具有优秀的定位精度。